
A groundbreaking advancement in robotics has unveiled the development of the world’s most diminutive fully programmable autonomous robots, crafted by researchers at the University of Pennsylvania and the University of Michigan. These microscopic machines, smaller than a grain of salt, possess the unprecedented ability to navigate liquid environments, perceive their surroundings, make independent decisions, and operate for extended periods, all while being remarkably cost-effective to produce. This innovation heralds a new epoch in micro-robotics, fundamentally redefining the potential for intelligent, self-sufficient systems at an almost invisible scale.
The pursuit of microscopic machines capable of performing tasks at cellular or molecular levels has long been a foundational goal in fields ranging from medicine to advanced manufacturing. For decades, scientists have envisioned tiny entities that could navigate the human body, repair tissues, deliver targeted therapies, or meticulously assemble components far too small for human hands. However, realizing this vision has been fraught with immense engineering complexities. Traditional robotics, reliant on macroscopic principles of movement, power, and control, simply do not scale down effectively to the sub-millimeter domain. The fundamental physics governing motion and interaction drastically shifts at such diminutive scales, presenting formidable obstacles to achieving true autonomy.
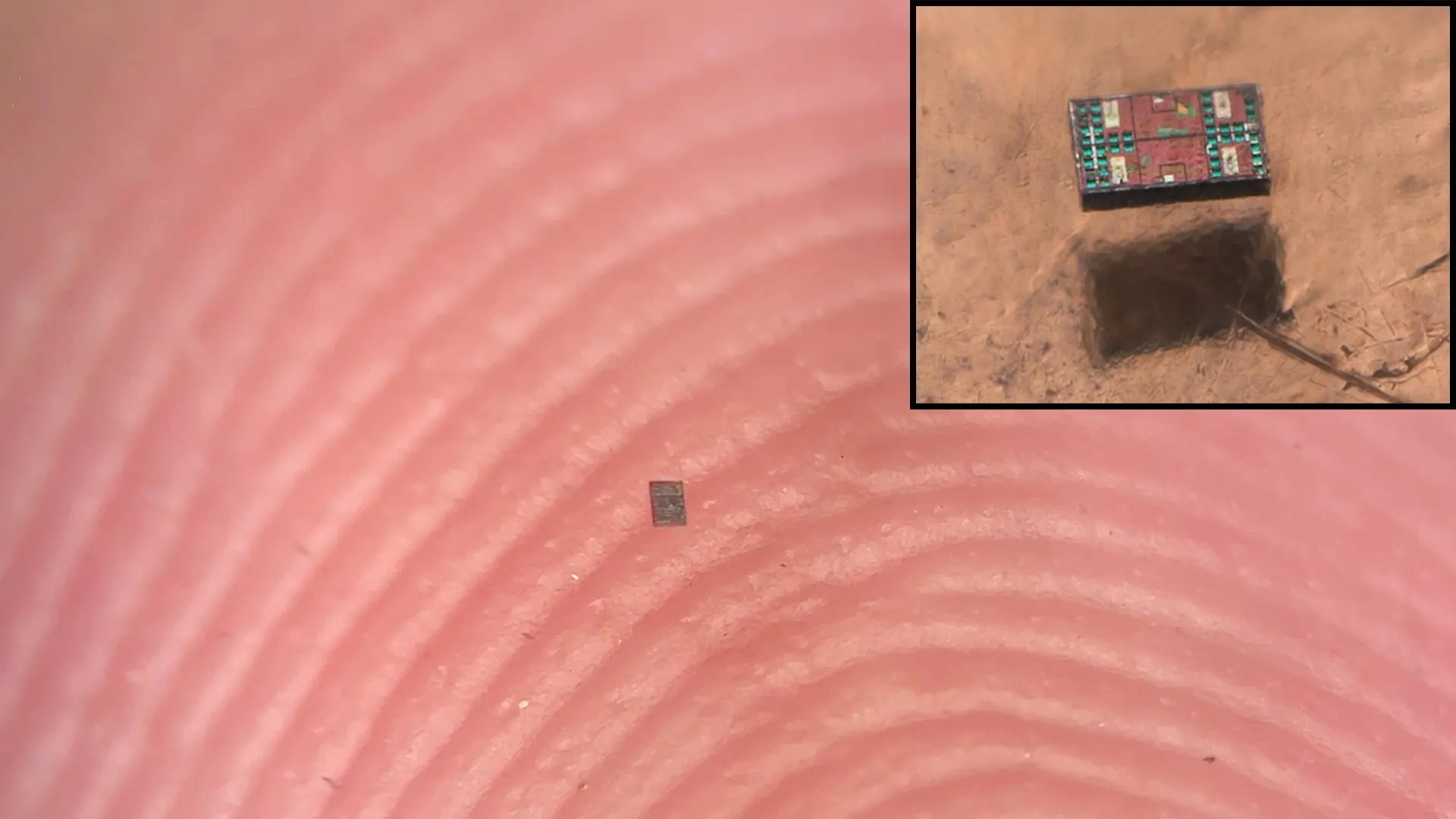
This recent breakthrough addresses many of these longstanding challenges by introducing robots that are not only minuscule but also truly independent. Each unit measures approximately 200 by 300 by 50 micrometers, rendering them barely discernible without optical magnification. To put this into perspective, they are smaller than a single grain of table salt. Crucially, these robots are fully programmable, meaning their actions can be dictated by embedded instructions, and they are autonomous, operating without the need for tethers, external magnetic fields, or continuous human oversight. Their energy source is ambient light, allowing them to function for months on end at an estimated production cost of mere pennies per unit. This confluence of attributes — size, intelligence, autonomy, and affordability — marks a significant departure from previous micro-machine prototypes, which often relied on external power and control mechanisms, limiting their practical applications.
The inherent difficulty in miniaturizing robots stems primarily from a fundamental shift in physics that occurs at the micro-scale. In the macroscopic world, forces such as gravity and inertia, which are proportional to an object’s volume, dominate motion. A car moves forward by overcoming air resistance and friction, with its momentum carrying it. However, as dimensions shrink to the micrometer level, volume-dependent forces diminish rapidly, while surface-related forces, particularly fluid drag and viscosity, become overwhelmingly dominant. For an object the size of these robots, moving through water is akin to a human swimming through molasses or tar. This dramatic alteration in the physical environment renders conventional robotic designs — featuring miniature arms, legs, or propellers — ineffective and impractical. Such tiny mechanical components are not only incredibly challenging to fabricate with precision but also exceedingly fragile and inefficient in a high-viscosity fluid medium.
To circumvent these physical impediments, the research teams, led by Marc Miskin, an Assistant Professor in Electrical and Systems Engineering at Penn Engineering, and David Blaauw, a professor at the University of Michigan, conceived an entirely novel propulsion mechanism. Instead of attempting to emulate the thrust-based movement of larger organisms, which rely on Newton’s Third Law of motion, these robots harness electrokinetic phenomena. They generate a localized electrical field that gently manipulates charged particles (ions) present in the surrounding liquid. As these ions are propelled by the electric field, they drag adjacent water molecules along with them, effectively creating a localized flow or "micro-current" in the fluid. The robot, caught within this self-generated current, is then carried along. Miskin aptly describes this as the robot causing the "river" around it to move, rather than simply pushing against the water. This elegant solution bypasses the need for complex moving parts, contributing significantly to the robots’ durability and simplicity of manufacture. By precisely adjusting the characteristics of this electrical field, the robots can modify their direction, execute intricate programmed trajectories, and even coordinate their movements into organized groups, reminiscent of a school of fish. They are capable of achieving speeds of approximately one body length per second.
Beyond mere locomotion, true autonomy necessitates embedded intelligence. This includes the ability to sense environmental parameters, process information, make decisions, and manage power independently. Integrating these complex functionalities onto a chip mere fractions of a millimeter across presented an enormous engineering hurdle. This critical aspect was primarily spearheaded by Professor Blaauw’s team at the University of Michigan, renowned for their expertise in ultra-low-power electronics and holding the record for the world’s smallest computer. The collaboration between Miskin’s expertise in propulsion and Blaauw’s in miniaturized computing proved synergistic, though it took five years of intensive development to integrate these disparate technologies into a cohesive, functional micro-robot.
One of the most significant challenges was power management. The tiny solar panels integrated into the robots’ design are capable of generating a mere 75 nanowatts of power—a minuscule fraction, over 100,000 times less than what a typical smartwatch consumes. To operate within such severe power constraints, the Michigan team engineered highly specialized circuits designed to function optimally at extremely low voltages. This innovative circuit architecture dramatically reduced power consumption by more than a thousand-fold, making self-sustained operation feasible. Space constraints further compounded the design complexity; the solar cells occupy the majority of the robot’s surface, leaving minimal area for computational hardware. To address this, the researchers undertook a radical redesign of the robot’s software. They condensed what would conventionally require numerous instructions for propulsion control into a single, highly specialized instruction, thereby shrinking the program’s memory footprint to fit within the robot’s exceedingly limited on-board memory.
This meticulous integration of propulsion and computing hardware resulted in what the researchers believe is the first sub-millimeter robot equipped with a complete computer system, including a processor, memory, and sensors. This unprecedented level of integration empowers the robots with genuine decision-making capabilities, allowing them to autonomously interact with and respond to their environment. For instance, the robots incorporate electronic temperature sensors capable of detecting subtle changes as small as one-third of a degree Celsius. This functionality opens avenues for monitoring localized thermal variations, which could serve as indicators of cellular activity or anomalies within biological systems.
Communication of sensed data from such minute robots posed another unique challenge. Traditional wireless communication methods would be too power-intensive and bulky. The researchers devised an ingenious method: the robots encode measured values, such as temperature, into specific patterns of movement or a "little dance" they perform. This "dance" is then observed through a microscope equipped with a camera, and the encoded data is subsequently decoded from the robots’ precise wiggles. This method draws an evocative parallel to the communication dances performed by honey bees, underscoring the innovative thinking applied to the problem. Furthermore, the very light that energizes the robots also serves as the medium for programming them. Each robot is assigned a unique digital address, enabling researchers to upload distinct sets of instructions to individual units. This capability is pivotal for deploying fleets of robots, each potentially tasked with a different role within a larger, coordinated operation.
This current generation of micro-robots represents a foundational platform, a "first chapter" in what promises to be a transformative field. The researchers envision future iterations that will possess enhanced capabilities, including more sophisticated programs, increased locomotion speeds, a broader array of sensor types (e.g., chemical, pH, pressure), and the ability to operate effectively in even more challenging or diverse environments. The modular design, combining a robust, low-power propulsion system with cost-effective, adaptable electronics, provides a flexible framework for continuous development and refinement.
The implications of this breakthrough are far-reaching and profound across multiple sectors. In the realm of medicine, these autonomous micro-robots could revolutionize diagnostics and therapeutics. Imagine swarms of these robots navigating the bloodstream to detect early signs of disease at the cellular level, such as identifying cancerous cells or pathogenic bacteria. They could be programmed to deliver highly targeted drug payloads directly to diseased tissues, minimizing systemic side effects and maximizing treatment efficacy. This could lead to new forms of minimally invasive surgery, in-body sensing for continuous health monitoring, or precision sampling of biological fluids.
Beyond healthcare, advanced manufacturing stands to benefit significantly. These robots could be deployed for the precision assembly of microscopic components, critical in the production of advanced electronics, micro-electromechanical systems (MEMS), and other intricate devices. They could also facilitate quality control at an unprecedented scale, identifying defects or anomalies that are currently undetectable. In environmental monitoring, micro-robot swarms could sample water or air quality at the micro-level, detecting pollutants or biological agents with high resolution. From a fundamental research perspective, these robots offer novel tools for studying biological processes, understanding collective behaviors in engineered systems, and exploring the intricate physics of the micro-world.
Despite the monumental progress, challenges remain. Current limitations include the relative simplicity of their programmed tasks, their modest speed, and the confined range of their sensing modalities. Future research will undoubtedly focus on developing more complex algorithms for autonomous decision-making, expanding the types of sensors they can carry (e.g., chemical, optical, force sensors), and improving propulsion efficiency for faster and more directed movement. A crucial area of development, particularly for biomedical applications, will be ensuring biocompatibility and potentially biodegradability of materials. Furthermore, developing intuitive interfaces for human operators to interact with and control large swarms of these microscopic entities in real-time will be essential for their widespread adoption.
This pioneering work fundamentally shifts the paradigm of micro-robotics. By demonstrating that it is possible to integrate a brain, sensors, and a motor into an object almost too small to perceive, and for it to function autonomously for extended periods, the researchers have laid a critical foundation. This achievement is not merely an incremental step but a transformative leap that opens the door to a completely new future for robotics at the micro-scale, promising to bridge the gap between human engineering and the intricate, dynamic world of microscopic life. This foundational advancement heralds an era where intelligent machines can operate within environments previously accessible only to biological organisms, ushering in unprecedented possibilities for scientific discovery, technological innovation, and human well-being.







